Еще в апреле НАСА вновь объявило конкурс предложений нового поколения роботов-исследователей и миссий. В рамках программы НАСА «Инновационные передовые концепции» (NIAC) она состояла из исследователей, ученых и предпринимателей, которые собрались вместе, чтобы представить ранние исследования новых концепций, которые могли бы в один прекрасный день помочь в достижении целей НАСА по исследованию космоса.
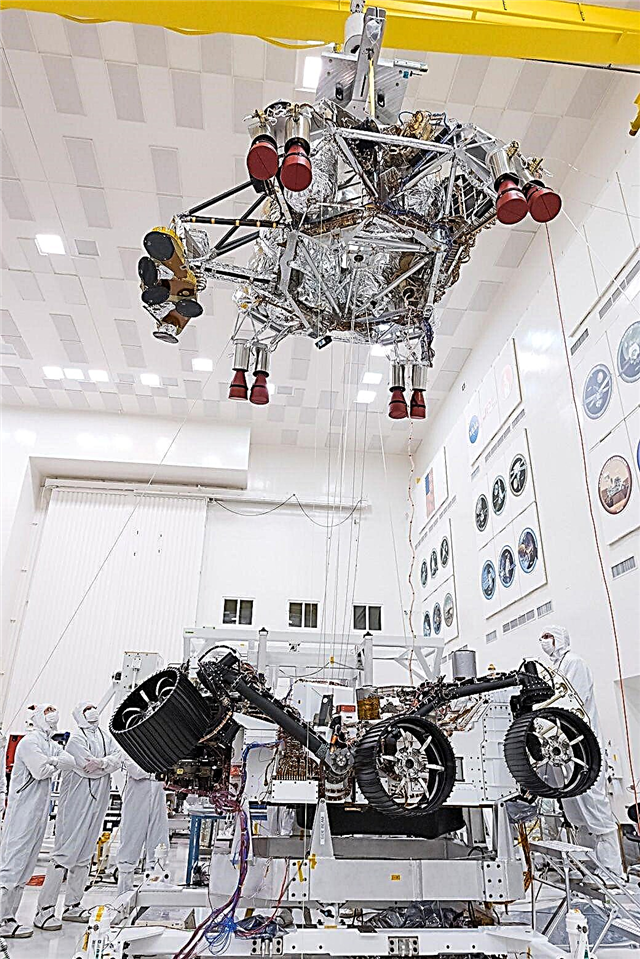
Одной из концепций, которая была выбрана для Фазы III разработки, была революционная система полета и полета под названием Mini Bee. Это небольшое роботизированное шахтерское судно было разработано Trans Astronautica (
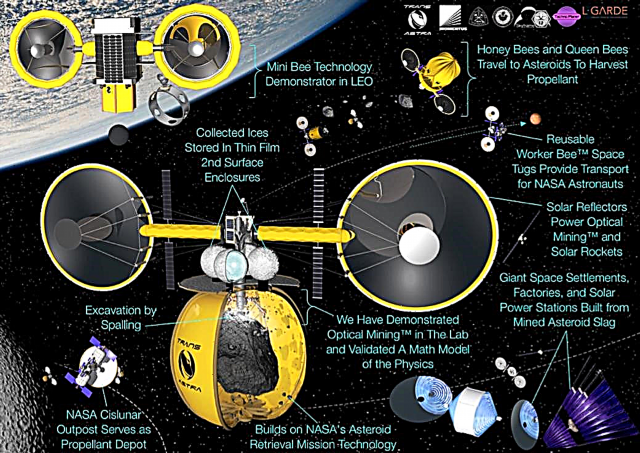
Концепция Mini-bee - это, по сути, демонстратор технологий для семейства систем полетов, известных как поставки на месте с помощью астероидов (Apis). Эти системы варьируются в размерах от экспериментальной мини-пчелы (которая весит 250 кг или 550 фунтов) до более крупных пчел и пчел-маток, которые способны захватывать астероиды диаметром 10 и 40 м (33 и 130 футов) соответственно. ,
Мини-пчела использует ряд инновационных технологий, которые включают в себя оптический метод добычи ресурсов (так называемый лазерный анализ), архитектуру космического корабля, которая использует солнечный свет для обеспечения более быстрого космического корабля, и систему удержания астероидов, подобную той, которая была предложена для Начатая НАСА Миссия по перенаправлению астероидов (ARM).
Наряду с другими концепциями Arpis, космический корабль-робот будет использовать солнечное тепловое двигательное устройство Omnivore на водной основе, чтобы найти свой путь на околоземной орбите или в глубоком космосе. Эта революционная технология концентрирует огромное количество солнечного света в реакционной камере, где затем нагревает воду и другие летучие соединения (углекислый газ, угарный газ, метан, аммиак), собираемые из астероидов для топлива.
Эта технология обеспечивает большую гибкость, поскольку роботизированным миссиям не нужно будет перевозить все свое топливо с собой, и они могут полагаться на тот же процесс использования ресурсов на месте (ISRU), который используется для сбора ресурсов, а также на закупку топлива. В этом отношении двигатель всеядного существа мало чем отличается от «Мира не хватает» (WINE), двигателя с паровым приводом, который в настоящее время разрабатывается Honeybee Robotics и Университетом Центральной Флориды (UCF).
Основной процесс, используемый Mini Bee, довольно прост, но также и очень сложен. Использование опции ARM Технология Mini Bee позволяет захватывать небольшой мусор в космосе. Надувные солнечные отражатели будут питать оптические шахтные лучи, которые затем будут использоваться для раскопок объекта (процесс, известный как «откалывание»), извлечения летучих веществ, таких как водяной лед, и последующего хранения их на борту космического корабля для транспортировки.
Для завершения этапа III,
Компания также работает над вариантом под названием «Рабочая пчела», который предназначен для использования в качестве орбитального транспортного средства (OTV), которое может доставлять оборудование и другие полезные грузы на высокие орбиты Земли, на Луну и, возможно, даже на Марс. Эти космические корабли также будут опираться на всеядное движущее устройство и, по сути, будут космическими буксирами, предоставляя услуги НАСА, коммерческим спутникам и, возможно, даже туристам.
Если и когда
Мечта об индустриализации космоса и предоставлении доступного цислунного туризма станет на шаг ближе!