Лаборатория реактивного движения НАСА недавно объявила, что разрабатывает небольшой беспилотный вертолет, чтобы разведать путь для будущих марсоходов. Зачем марсоходам такой робот-гид? Ответ в том, что ехать на Марсе очень сложно.
Здесь, на Земле, роботы, исследующие вулканические обода или помогающие спасателям, могут управляться дистанционно с помощью джойстика. Это связано с тем, что радиосигналы достигают робота из центра управления практически мгновенно. Вождение на Луне не намного сложнее. Радиосигналы, распространяющиеся со скоростью света, занимают около двух с половиной секунд, чтобы добраться до Луны и обратно. Эта задержка недостаточно велика, чтобы серьезно мешать вождению пульта дистанционного управления. В 1970-х советские диспетчеры управляли луноходами Лунохода таким образом, успешно исследуя более 40 км лунной местности.
Вождение на Марсе намного сложнее, потому что это намного дальше. В зависимости от его положения относительно Земли, сигналы могут занять от 8 до 42 минут в оба конца. Предварительно запрограммированные инструкции должны быть отправлены роверу, который он затем выполняет самостоятельно. Каждый марсианский драйв занимает часы тщательного планирования. Стереоизображения, сделанные навигационными камерами ровера, тщательно изучаются инженерами. Изображения с космического корабля, вращающегося вокруг Марса, иногда предоставляют дополнительную информацию.
Ровер может быть запрограммирован либо просто выполнять список команд движения, посылаемых с Земли, либо он может использовать изображения, снятые его навигационными камерами и обработанные его бортовыми компьютерами, для измерения скорости и самостоятельного обнаружения препятствий или опасностей. Он может даже построить свой собственный безопасный путь к указанной цели. Приводы на основе инструкций с земли самые быстрые.
Таким образом, дух и возможность исследования марсоходов на марсе могут проехать до 124 метров в час. Это соответствует примерно длине американского футбольного поля. Но этот режим был также наименее безопасным.
Когда ровер активно ведет себя с помощью своих камер, прогресс безопаснее, но гораздо медленнее из-за всей необходимой обработки изображения. Он может прогрессировать всего на 10 метров в час, что примерно равно расстоянию от линии ворот до линии 10 ярдов на поле для американского футбола. Этот метод должен использоваться всякий раз, когда у ровера нет четкого представления о маршруте впереди, что часто имеет место из-за пересеченной и холмистой местности.
По состоянию на начало 2015 года дальний проезд Curiosity за один день составляет 144 метра. Самая длинная ежедневная поездка в Opportunity составляла 224 метра, на расстоянии двух полей от американского футбола.
Если бы наземные диспетчеры могли лучше видеть путь вперед, они могли бы разработать инструкции, позволяющие будущему марсоходу безопасно проехать намного дальше за день.
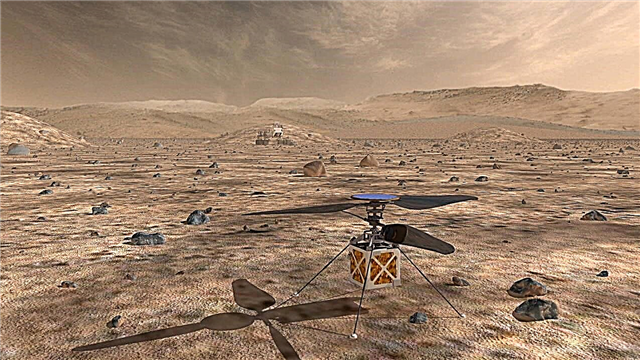
Вот тут-то и возникает идея беспилотного вертолета. Вертолет может вылетать впереди ровера каждый день. Снимки, сделанные с его точки наблюдения с воздуха, будут иметь неоценимое значение для наземных диспетчеров для определения точек, представляющих научный интерес, и планирования маршрутов движения для их достижения.
Полет вертолета на Марс ставит особые задачи. Одним из преимуществ является то, что сила притяжения Марса на 38% выше, чем у Земли, так что вертолету не нужно будет создавать такой же подъем, как у одной и той же массы на Земле. Лопасти винта вертолета создают подъемную силу, толкая воздух вниз. На Марсе это сложнее, чем на Земле, потому что атмосфера Марса в сотни раз тоньше. Чтобы вытеснить достаточно воздуха, лопасти гребного винта должны вращаться очень быстро или быть очень большими.
Вертолет должен быть способен летать самостоятельно, используя предварительные инструкции, поддерживая стабильный полет по заранее указанному маршруту. Он должен приземляться и взлетать неоднократно в каменистой марсианской местности. Наконец, он должен быть в состоянии выжить в суровых условиях Марса, где температура падает до 100 градусов по Фаренгейту или ниже каждую ночь.
Инженеры JPL разработали вертолет массой 1 килограмм; крошечная фракция 900 кг массы марсохода Curiosity. Его лопасти пропеллера простираются на 1,1 метра от конца лопасти до конца лопасти и способны вращаться со скоростью 3400 оборотов в минуту. Тело размером с коробку из ткани.
Вертолет работает на солнечной энергии, а диск с солнечными элементами собирает достаточно энергии каждый день для обеспечения полета в течение двух-трех минут и для обогрева автомобиля ночью. За это время он может пролететь около половины километра, собирая изображения для передачи на наземное управление. Инженеры ожидают, что разведка, которую соберет беспилотный вертолет, будет иметь неоценимое значение при планировании поездок ровера, утроив расстояние, которое можно преодолеть за день.
Ссылки и дальнейшее чтение:
Спасибо Марку Маймону из Лаборатории реактивного движения НАСА за информацию о ежедневных расстояниях вождения Любопытства и Возможностей.
Джей-Джей Biesiadecki, P. C. Leger и M.W. Maimone (2007), «компромиссы между направленным и автономным вождением на марсоходах для исследования Марса», Международный журнал исследований робототехники, 26 (1), 91-104
Э. Хауэлл, марсоход Opportunity Mars проезжает около 41 километра в направлении «Марафонской долины», журнал Space, декабрь 2014 года.
Т. Рейес, Невероятное путешествие, марсоход Curiosity достигает основания горы Шарп. Космический журнал, сентябрь 2014.
Вертолет может быть «разведчиком» для марсоходов. Лаборатория реактивного движения НАСА Пресс-релиз. 22 января 2015 г.
Сумасшедшая инженерия: вертолет Марс. Лаборатория реактивного движения НАСА видео.
Curiosity - Mars Science Laboratory, НАСА.
Марс - планы на будущий ровер. НАСА