Когда 1-тонный марсоход Curiosity Mars НАСА отправляется в свой эпический поход к древним осадочным слоям у подножия таинственной горы Шарп, журнал Space провел эксклюзивное интервью с руководителем проекта Curiosity Джимом Эриксоном из Лаборатории реактивного движения НАСА (JPL), чтобы получить информацию о нем. новейший совок так сказать о роботах потусторонних приключений.
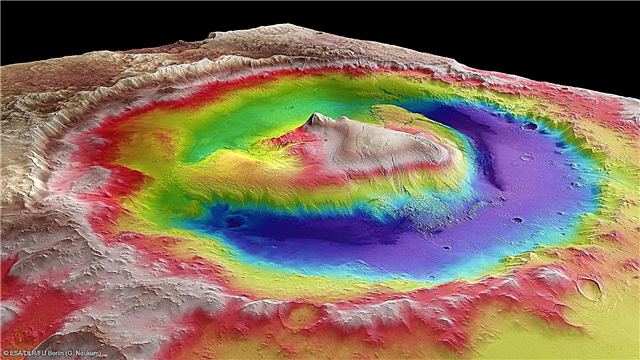
Научно-технические группы старательно работают сейчас, чтобы ускорить путешествие марсоходов на марсианскую гору высотой 3,4 мили (5,5 км), которая является основным пунктом назначения миссии и содержит тайники с минералами, которые являются ключом к зажиганию и поддержанию жизни.
«Мы покинули Гленелг и обнажение Шейлер и отправились на гору Шарп», - сказал мне Эриксон.
В целом шестиколесный марсоход только превысил отметку в 1 километр (0,62 мили) при движении по Красной планете.
Гора Шарп находится примерно в 5 милях (8 километрах) от нас, когда летит марсианская ворона.

Любопытство должно будет пересечь потенциально коварные дюнные поля на длинном пути вперед к слоистой горе.
«Все идет очень хорошо, и у нас есть пара приводов за пояс», сказал Эриксон.
Любопытство только что завершило более чем полугодовую обильную науку в Гленелге и бухте Йеллоунайф, где она обнаружила обитаемую среду на Красной планете с химическими ингредиентами, которые могли поддерживать марсианские микробы, и тем самым уже выполнила основную цель флагманской миссии НАСА на Марс.
Обработчики Curiosity модернизируют «мозг» роверов новым программным обеспечением для вождения, делая ее умнее, продуктивнее и способнее, чем когда-либо прежде, а также гораздо более независимой с момента ее захватывающего приземления в кратере Гейл почти год назад 6 августа 2012 года.
«Мы продолжаем ездить регулярно. Следующая поездка запланирована завтра и будет выполнена на следующий день ».
На сегодняшний день (Sol 336, 17 июля), Curiosity ездил шесть раз с тех пор, как покинул Гленелг 4 июля (Sol 324), в общей сложности более 180 метров.

Ученые специально нацелили Curiosity на кратер Гейла и гору Шарп, потому что он загружен залежами глинистых минералов, которые образуются в нейтральной воде и которые могли бы поддержать происхождение и эволюцию простых марсианских форм жизни, прошлого или настоящего.
Эриксон работал на ключевых постах во многих планетарных научных исследованиях НАСА, начиная с Викинга. К ним относятся миссия Галилео на Юпитер, MER rovers Spirit & Opportunity, а также работа с Mars Reconnaissance Orbiter (MRO).
Вот первая часть моего широкого разговора с Джимом Эриксоном, менеджером проекта Curiosity в JPL. Часть 2 будет следовать.
Я попросил Эриксона описать новое программное обеспечение для вождения, называемое автономной навигацией или autonav, и как оно поможет ускорить Curiosity на ее пути. До сих пор инженеры на Земле делали большую часть планирования для нее.
Джим Эриксон: Мы установили на автомобиль сразу же после мартовского периода в марте 2013 года новое программное обеспечение, называемое autonav или автономная навигация. Это повысит нашу способность управлять автомобилем.
Причина, по которой мы поместили его на борт, заключается в том, что мы знали, что это будет полезно, когда мы начали долгий путь к горе Шарп. И нам не терпится проверить это. В течение следующих нескольких недель мы будем проводить различные тесты с autonav.
Кен Кремер: Как autonav поможет Curiosity?
Джим Эриксон: У ровера будет возможность понять, как далеко он едет, неважно, скользит он или нет, и повысить безопасность.
И тогда будет действовать следующий шаг, позволяющий роверу двигаться самостоятельно.
Кен: Как часто Curiosity будет ездить?
Джим Эриксон: Где-то, как каждый день или около того. Мы планируем поездку, смотрим, как она проходит и прошла ли она хорошо, и затем мы переходим к следующей поездке. Мы реализуем это в том виде, в каком оно есть, пока мы делаем проверки autonav.
Возможно, нам придется прекратить движение для части проверки автонавета, чтобы завершить тестирование.
В основном мы ограничены в основном количеством дней, которые мы успешно завершили предыдущим днем. И есть ли у нас информация, возвращаемая [на Землю], чтобы мы могли спланировать поездку на следующий день.
В некоторых случаях время на Марсе может меняться, поэтому мы не можем вернуть данные вовремя, поэтому мы не будем ездить в этот день.
Кен: Ты можешь водить два дня подряд?
Джим Эриксон: Да, мы можем, если время выбрано правильно. Если мы получим результаты поездки за день (n) до того, как планируем поездку на следующий день (n + 1), почти так, как если бы вы были на Марсе. Тогда это будет работать нормально.
Кроме того, когда мы получаем возможность автонаведения, мы можем планировать два дня подряд. Один день направленного вождения, а второй - «хорошо, вот ваша цель, где бы вы ни находились, попробуйте добраться до этого места».
Это увеличит производительность!
Кен: Когда autonav будет запущен?
Джим Эриксон: Примерно две-три недели. Нам нужно тщательно изучить все тесты и сначала проверить их, чтобы мы все чувствовали себя комфортно с autonav.
Кен: Каков марсианский ландшафт на полу кратера Гейла, как сейчас и на следующие несколько миль?
Джим Эриксон: Это смесь песка и разных каменных плит. Когда мы начнем, нам нужно будет комфортно ездить на обоих. Не так много больших камней, которые могли бы стать проблемой прямо сейчас. Есть какая-то полка, по которой мы будем ходить.
Прямо сейчас область, в которой мы находимся, - это действительно хорошая вещь, чтобы дать нам возможность выявлять препятствия и обходить их. Это поможет нам позже, когда мы увидим препятствия и захотим ехать быстрее.
Кен: Каков общий план сейчас, сосредоточиться на вождении или остановке и расследовании?
Джим Эриксон: - Не стоит останавливаться. Это будет хорошая пара недель вождения.
Во второй части моего разговора с Джимом Эриксоном мы обсудим больше о перемещении марсохода по чужой территории, которая является одновременно золотым рудником науки и потенциальной смертельной ловушкой, а также о бурении и взятии проб, наблюдениях кометы ISON и предстоящих научных задачах.
Предыдущий опыт работы с марсоходами на Марсе будет чрезвычайно полезен при изучении взаимодействия марсохода с полями дюн. Autonav был впервые применен на роверах MER.
Водители роверов и научная команда приобрели большой опыт и ноу-хау, управляя Духом и Возможностями через многочисленные гигантские поля дюн самых разных по составу и сложности.
Следите за новостями с Марса.